
Project Tags: thesis
-
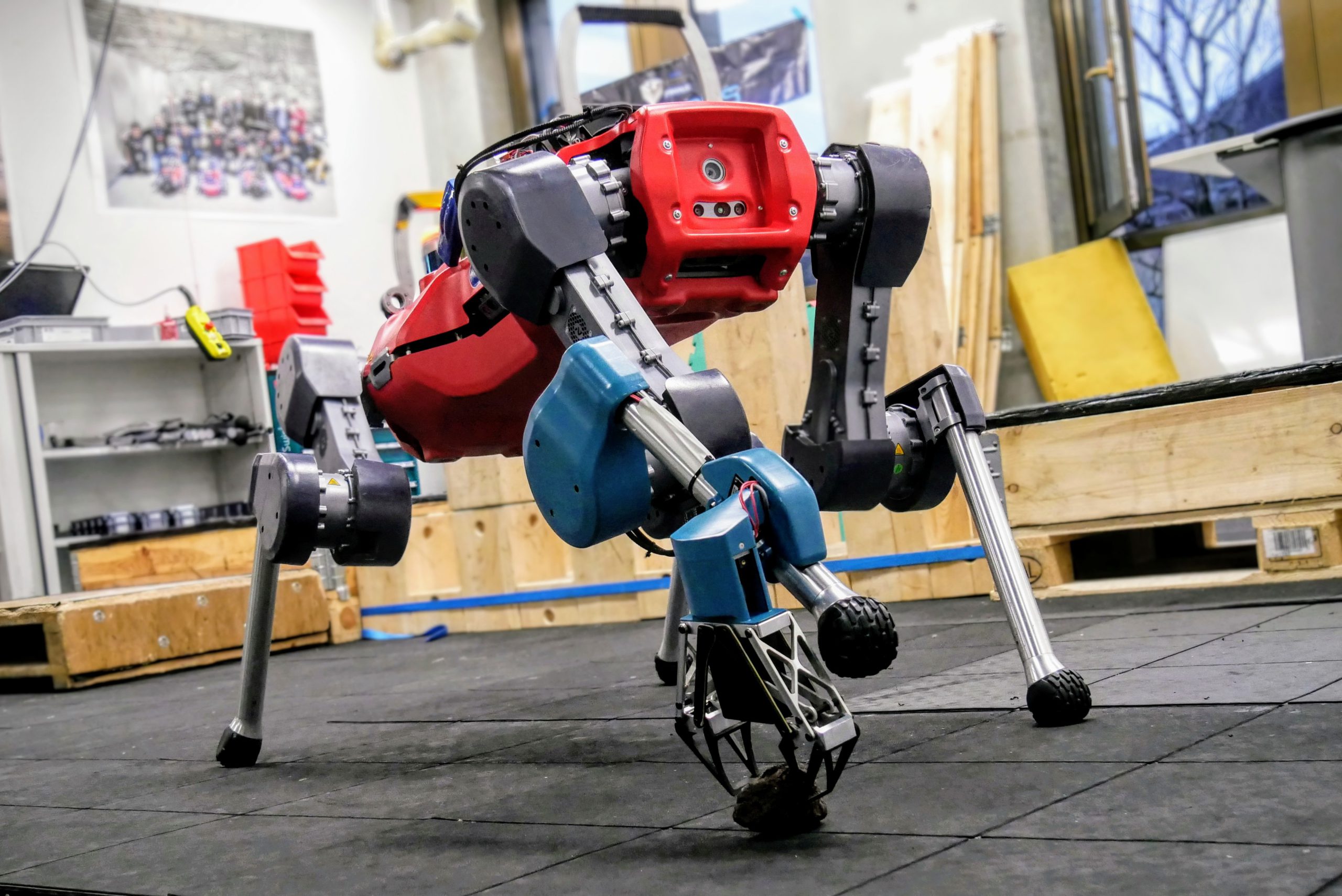
Foot Gripper
Project Duration:July 2022 – February 2023 At the renowned Robotic Systems Lab (RSL) I designed and built a jaw gripper for the lower limb of the four-legged robot ANYmal for my final thesis of the Master of Science in Robotics, Systems and Control at ETH Zurich. Traditionally, an additional arm is mounted to the back…
-

Robust Hand
Project Duration:October 2021 – March 2022 In my semester thesis for the Master’s in Robotics and Control Systems at the Soft Robotics Lab (SRL) of ETH Zurich, I aimed to build a robust gripper. The demand for this research came from the Robotic Systems Lab (RSL) and their research centering around four-legged robot ANYmal. The…