
Project Tags: ROS
-
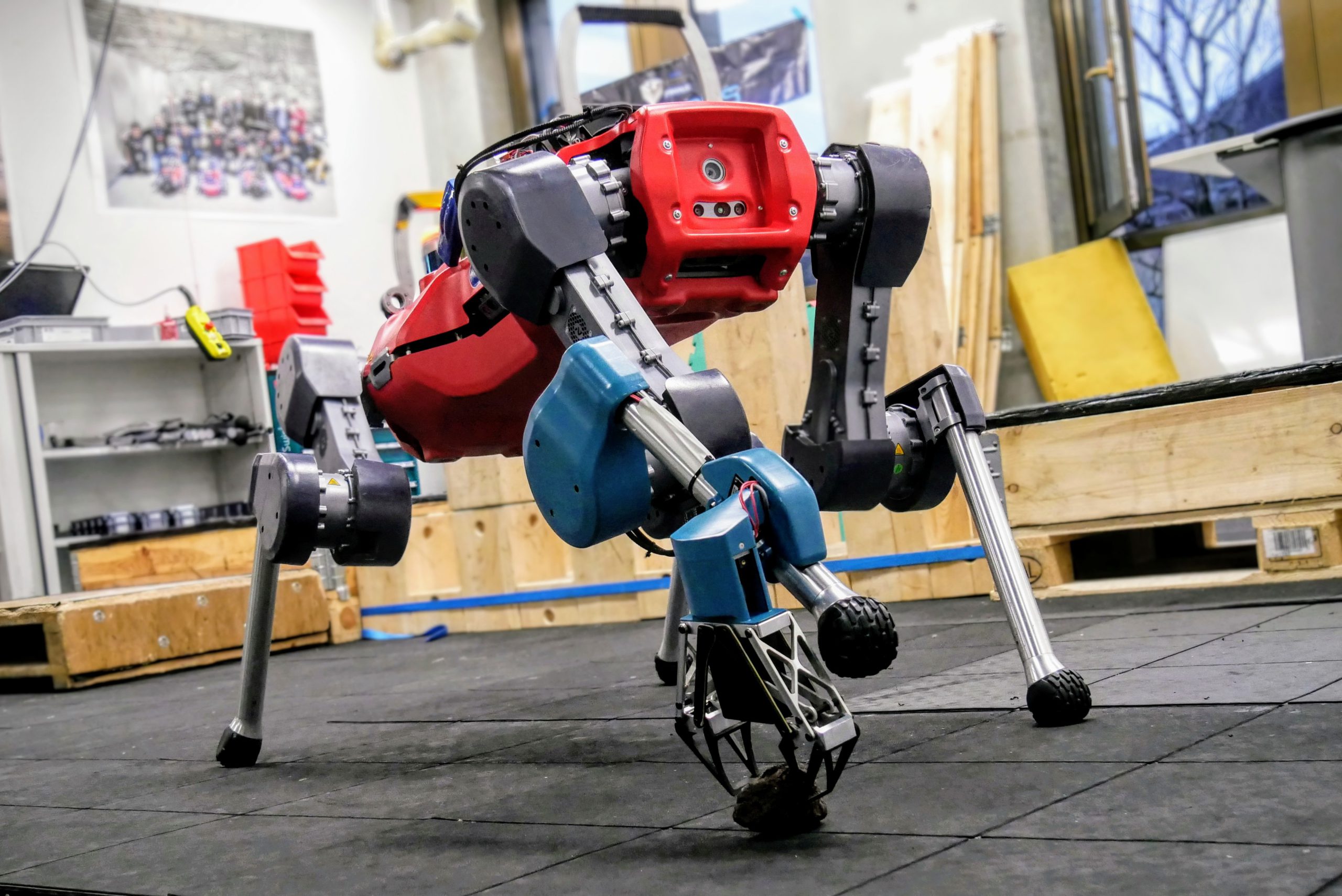
Foot Gripper
Project Duration:July 2022 – February 2023 At the renowned Robotic Systems Lab (RSL) I designed and built a jaw gripper for the lower limb of the four-legged robot ANYmal for my final thesis of the Master of Science in Robotics, Systems and Control at ETH Zurich. Traditionally, an additional arm is mounted to the back…
-

Exoskeleton: VariLeg enhanced
Project Duration:September 2018 – May 2019 Our team VariLeg enhanced has designed and built an exoskeleton for the Cybathlon 2020. Wearing our electrically powered exoskeleton, paraplegics can walk again. In just eight months, 15 students from ETH Zurich and HSR Rapperswil went from conception to a functional product. We worked on the exoskeleton as part…