
Project Tags: ETH Zurich
-
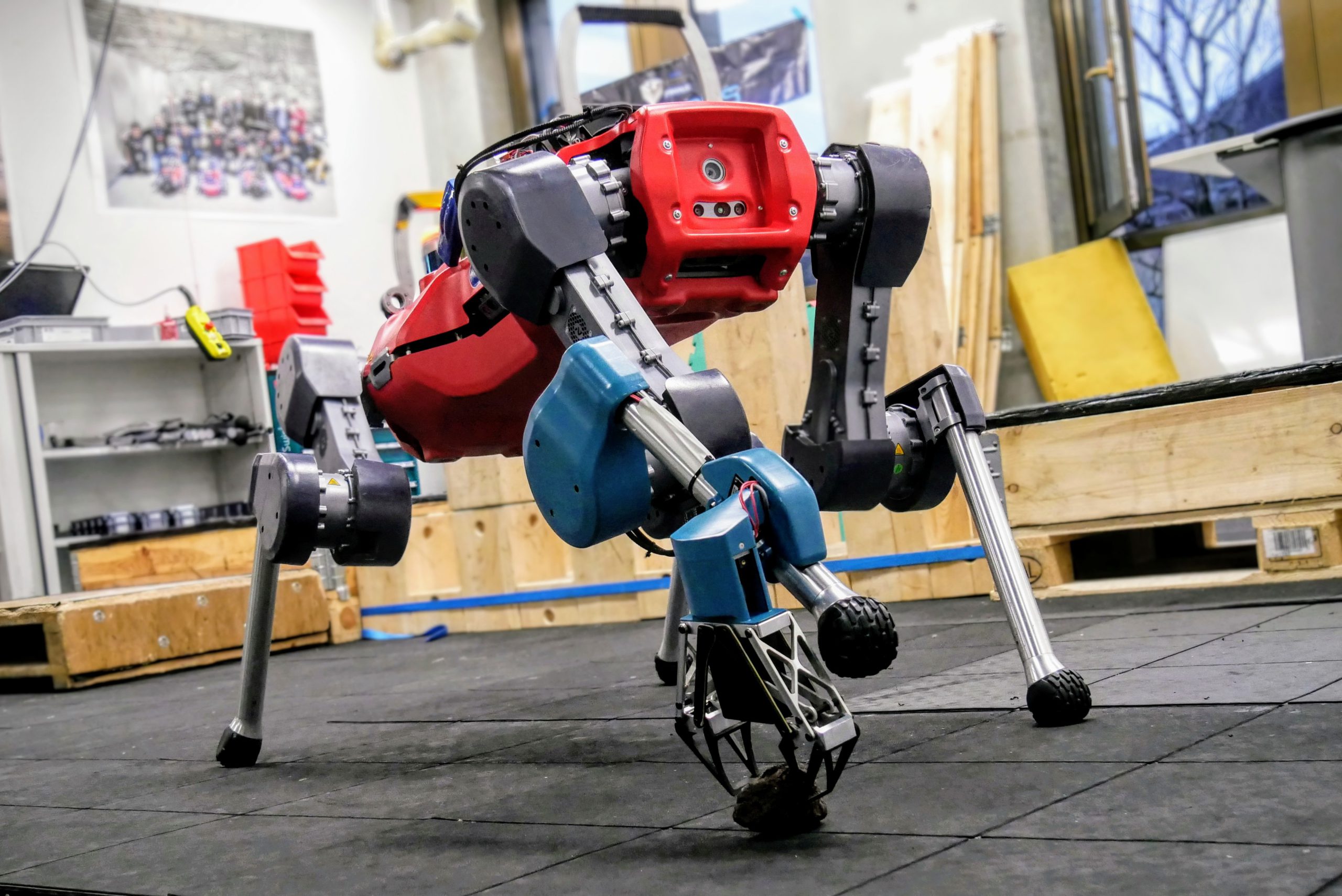
Foot Gripper
Project Duration:July 2022 – February 2023 At the renowned Robotic Systems Lab (RSL) I designed and built a jaw gripper for the lower limb of the four-legged robot ANYmal for my final thesis of the Master of Science in Robotics, Systems and Control at ETH Zurich. Traditionally, an additional arm is mounted to the back…
-

Robust Hand
Project Duration:October 2021 – March 2022 In my semester thesis for the Master’s in Robotics and Control Systems at the Soft Robotics Lab (SRL) of ETH Zurich, I aimed to build a robust gripper. The demand for this research came from the Robotic Systems Lab (RSL) and their research centering around four-legged robot ANYmal. The…
-

Exoskeleton: VariLeg enhanced
Project Duration:September 2018 – May 2019 Our team VariLeg enhanced has designed and built an exoskeleton for the Cybathlon 2020. Wearing our electrically powered exoskeleton, paraplegics can walk again. In just eight months, 15 students from ETH Zurich and HSR Rapperswil went from conception to a functional product. We worked on the exoskeleton as part…
-

Cooler Calmer Singapore: WeatherTimelapse
Project Duration:December 2014 – April 2015 In 2015, I worked for five months in Singapore at the Future Cities Laboratory of ETH Zurich in Singapore. There, I worked on the project WeatherTimelapse. The researcher of the research initiative Cooler Calmer Singapore required a 360° time-lapse photography system to better understand the surrounding weather. Additionally, the…